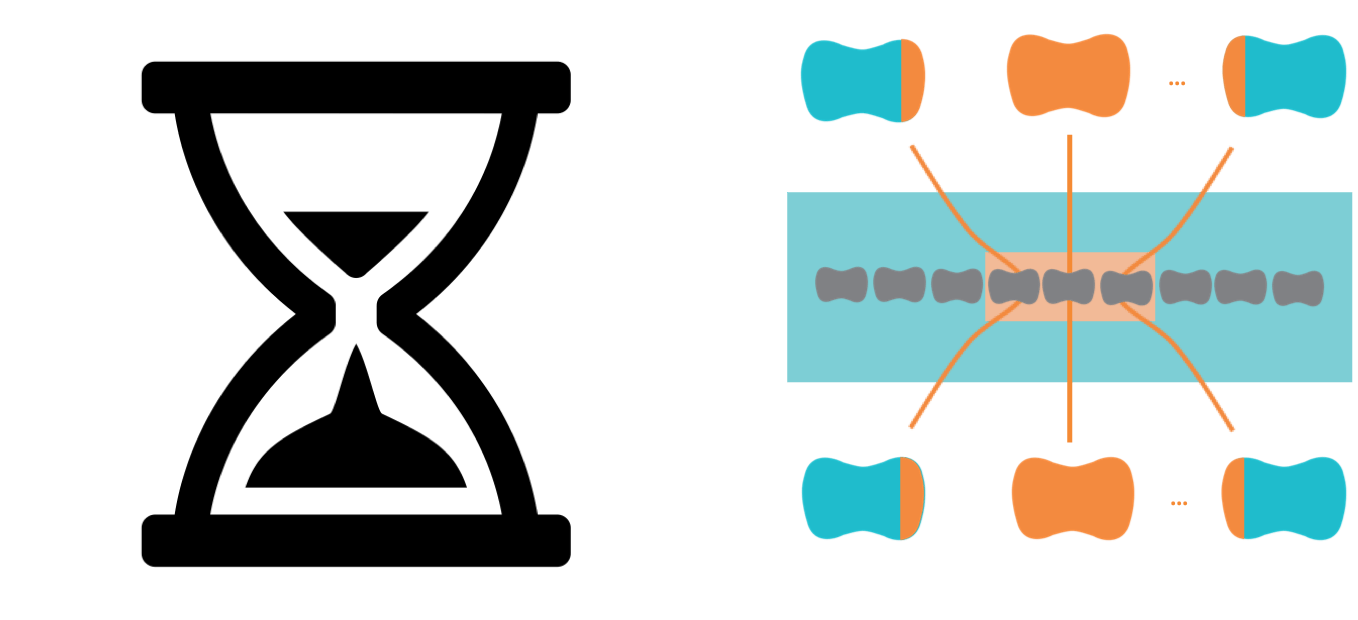
Hour-Glass Model for Platform MVP
An MVP ‘thin slice’ allows the product team to align a key business process for clear desired outcomes and value to ones who are ultimately paying up. This thought needs…
An MVP ‘thin slice’ allows the product team to align a key business process for clear desired outcomes and value to ones who are ultimately paying up. This thought needs…
XConf ThoughtWorks' XConf is a one-day conference that showcases the latest thinking from ThoughtWorks and friends on a broad range of topics. It provides a platform for passionate software professionals…
Definition: In Software, a Product is something that is result of a design & software process and has a business model. Read here how I arrived at this definition: Product…

Before we start on Product Thinking, it will be good to understand what a Product is. Product is something that is the result of a process. Now, in the software…